

研控MCC系列運(yùn)動(dòng)控制卡使用方便验懊,功能可靠符貌,一般來(lái)說(shuō)是不會(huì)在使用過(guò)程中產(chǎn)生位置偏差的红淡。但是在長(zhǎng)期客戶服務(wù)的過(guò)程中我們也遇到了一些因使用不當(dāng)造成的位置偏差,如果沒(méi)有豐富的經(jīng)驗(yàn)湖饱,往往會(huì)判斷為運(yùn)動(dòng)控制卡的問(wèn)題裹唆,而實(shí)際上真正的原因是在使用過(guò)程中有一些軟硬件問(wèn)題未加以注意造成的槐伍。不管使用運(yùn)動(dòng)控制卡或其他類別的運(yùn)動(dòng)控制產(chǎn)品优生,如果對(duì)這些問(wèn)題不加注意,它往往會(huì)在不經(jīng)意間出現(xiàn)盖疾,引起機(jī)械運(yùn)動(dòng)誤差狞穗,造成損失。而當(dāng)你在實(shí)驗(yàn)室中針對(duì)它進(jìn)行測(cè)試時(shí)警沧,又因?yàn)閰?shù)和使用環(huán)境的變化民轴,問(wèn)題卻不能重現(xiàn),所以非常難以捕捉球订。本文主要針對(duì)這幾個(gè)最常見的疑難問(wèn)題進(jìn)行描述后裸、分析、并提出一定的解決方法辙售。
第一節(jié) 首先應(yīng)該做什么
在客戶提出使用控制卡出現(xiàn)了位置偏差的時(shí)候轻抱,首先應(yīng)該做的就是定位偏差來(lái)源飞涂,也就是定位“究竟是控制卡的問(wèn)題旦部,還是電機(jī)和機(jī)械的問(wèn)題”?這是非常關(guān)鍵的定位思路较店。
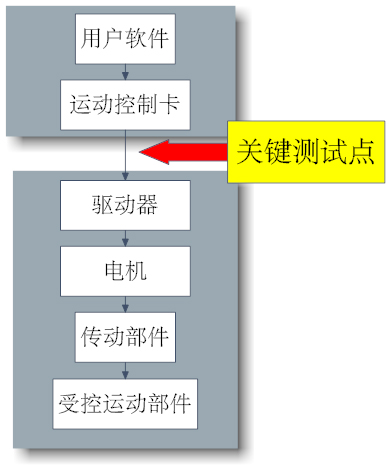
原因在于士八,“軟件和控制卡的問(wèn)題”的尋找定位和“電機(jī)和機(jī)械的問(wèn)題”的尋找定位是完全不同的方式容燕,如果首先不區(qū)分好是哪一個(gè)模塊的問(wèn)題就直接深入到細(xì)節(jié)上,往往會(huì)找錯(cuò)方向婚度。
最常見的定位工具是伺服驅(qū)動(dòng)器的“顯示指令位置”功能蘸秘,如果問(wèn)題軸所用電機(jī)正好是伺服電機(jī),那就非常方便了蝗茁。如果使用的是步進(jìn)電機(jī)僚洋,則可能需要外接一個(gè)伺服電機(jī)進(jìn)行測(cè)試。其他如示波器泊术、邏輯分析儀也可以進(jìn)行測(cè)試候赏,但是不如伺服電機(jī)方便。
測(cè)試方法非常簡(jiǎn)單沃菩,就是首先計(jì)算出某一工位處盯媚,控制卡“按理應(yīng)該發(fā)送多少個(gè)脈沖”,然后觀察伺服驅(qū)動(dòng)器的顯示片迁,是否“接受到了同樣數(shù)量的脈沖”抖唧。如果兩個(gè)數(shù)量一致,并且長(zhǎng)期工作后(過(guò)程中沒(méi)有借助傳感器的復(fù)位動(dòng)作煞肠,如果有復(fù)位動(dòng)作則是另一回事瓤鬓,后文有詳述),還是精確一致的話登鄙,就說(shuō)明軟件和運(yùn)動(dòng)控制卡沒(méi)有問(wèn)題既憔,需要在電機(jī)和機(jī)械上找問(wèn)題。相反骤公,如果運(yùn)行一段時(shí)間后抚官,到達(dá)指定工位時(shí),控制卡“理應(yīng)發(fā)送的脈沖數(shù)”與“伺服電機(jī)接受的脈沖數(shù)”不相同了阶捆,并且有誤差越來(lái)越大或者誤差大小隨機(jī)變化的情況凌节,則可以判斷是下文中提到的“疑難問(wèn)題”之一。
第二節(jié) 取整誤差累計(jì)
取整誤差累計(jì)是因?yàn)樯衔粰C(jī)控制軟件在設(shè)計(jì)時(shí)洒试,全部采用“相對(duì)位置運(yùn)動(dòng)”功能倍奢,在計(jì)算相對(duì)位置脈沖數(shù)時(shí),由于取整誤差造成的小數(shù)位脈沖數(shù)丟棄垒棋,而當(dāng)正向丟棄數(shù)和反向丟棄數(shù)不一至?xí)r就會(huì)造成微小的位置偏差卒煞,經(jīng)過(guò)長(zhǎng)期運(yùn)行反復(fù)積累后,此偏差逐漸會(huì)發(fā)展到肉眼可見的程度叼架。舉例如下:
某客戶在數(shù)控平面鉆孔機(jī)上采用了運(yùn)動(dòng)控制卡畔裕,工位和運(yùn)動(dòng)方式如下:
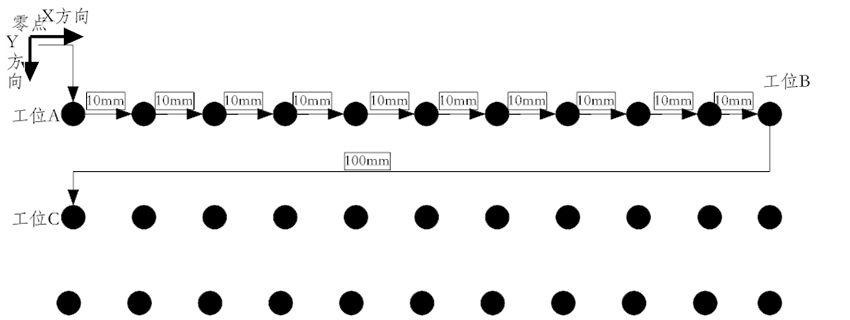
如圖所示,鉆頭從原點(diǎn)出發(fā)乖订,到達(dá)工位A開始鉆第一個(gè)孔扮饶,然后向右逐個(gè)鉆孔具练,孔之間橫向間距10mm,鉆到工位B后惜肃,X方向橫向平移喝壹,同時(shí)Y方向移動(dòng),到達(dá)工位C盲狈。
程序員是這樣設(shè)計(jì)程序的:
float ValueX = 500.19; //脈沖當(dāng)量,500.19個(gè)脈沖機(jī)械走1mm
float MMTargetX=0; //運(yùn)行目標(biāo)相對(duì)位置
long PulseTargetX=0; //運(yùn)行目標(biāo)相對(duì)位置
MMTargetX=10; //橫向運(yùn)行距離10mm
PulseTargetX= (long) (MMTargetX * ValueX); //得到運(yùn)行脈沖數(shù)5001
YK_start_s_move(XAxisNum, PulseTargetX); //發(fā)指令讓X軸正向走5001個(gè)脈沖
//等待運(yùn)行結(jié)束
MMTargetX=10; //橫向運(yùn)行距離10mm
PulseTargetX= (long) (MMTargetX * ValueX); //得到運(yùn)行脈沖數(shù)5001
YK_start_s_move(XAxisNum, PulseTargetX); //發(fā)指令讓X軸正向走5001個(gè)脈沖
//等待運(yùn)行結(jié)束
……運(yùn)行10次
MMTargetX=-100; //橫向運(yùn)行距離-100mm
PulseTargetX= (long) (MMTargetX * ValueX); //得到運(yùn)行脈沖數(shù)-50019
YK_start_s_move(XAxisNum, PulseTargetX); //發(fā)指令讓X軸反向走50019個(gè)脈沖
//等待運(yùn)行結(jié)束
從上面的程序很容易看出來(lái)旱已,正向運(yùn)行時(shí),總共走了5001×10=50010個(gè)脈沖螺矮,而反向運(yùn)行時(shí)派料,走了50019個(gè)脈沖。雖然看起來(lái)每次正向運(yùn)行了10mm滑攘,運(yùn)行10次后腊匆,反向運(yùn)行了100mm,所以在工位C處X軸坐標(biāo)應(yīng)該跟工位A一致超璧,但是實(shí)際上由于正向運(yùn)行時(shí)取整誤差舍去了10次0.9個(gè)脈沖隙趣,而反向運(yùn)行時(shí)則沒(méi)有因?yàn)槿≌`差而舍去脈沖,所以一來(lái)一回就會(huì)有9個(gè)脈沖的累計(jì)嘴缓。
對(duì)于一般的機(jī)械設(shè)備來(lái)說(shuō)旱万,9個(gè)脈沖可能還看不出來(lái)位置的偏差,但是隨著反復(fù)的加工吐句,如果沒(méi)有借助傳感器的復(fù)位動(dòng)作的話胁后,這個(gè)誤差會(huì)逐漸隨機(jī)積累,位置會(huì)越來(lái)越偏嗦枢,最終導(dǎo)致加工失敗攀芯。
這個(gè)問(wèn)題的出現(xiàn)純屬軟件工程師經(jīng)驗(yàn)不足。如果想要在程序設(shè)計(jì)時(shí)避免此問(wèn)題文虏,有以下方法可以解決侣诺。
方法一:避免在整個(gè)加工過(guò)程中全部使用“相對(duì)位置運(yùn)動(dòng)”,在一個(gè)加工流程中添加一定量的氧秘,至少一條絕對(duì)運(yùn)動(dòng)指令年鸳,就可以消除掉取整誤差的帶來(lái)的積累偏差。
如在上述工序中丸相,在工位A處記錄X軸坐標(biāo)搔确,然后將從工位B到工位C的移動(dòng)改用“絕對(duì)位置移動(dòng)”指令。在工位B時(shí)灭忠,運(yùn)動(dòng)控制卡會(huì)自動(dòng)讀取當(dāng)前的實(shí)際坐標(biāo)膳算,與工位A處的坐標(biāo)進(jìn)行對(duì)比,然后準(zhǔn)確地走出50010個(gè)脈沖鹰觅,這樣一來(lái)涮婿,從工位A到工位B的所有取整誤差就全部糾正過(guò)來(lái)了。
方法二:增加復(fù)位動(dòng)作田蝠。
每個(gè)工件加工完成后利用傳感器進(jìn)行一次原點(diǎn)復(fù)位動(dòng)作掠佛,不僅能消除取整誤差的積累,而且還能消除機(jī)械誤差的積累权塑,也是不錯(cuò)的選擇蔽碘。
除了上述的“往返”運(yùn)動(dòng),有些單向送料系統(tǒng)托茅,如制袋機(jī)類武慨,在重復(fù)進(jìn)行單方向運(yùn)行時(shí),由于取整誤差的積累也會(huì)引起加工問(wèn)題层焚。而此類系統(tǒng)又無(wú)法進(jìn)行復(fù)位或者插入“絕對(duì)位置運(yùn)動(dòng)”指令行掰。這種情況下推薦在編程時(shí)采用一種簡(jiǎn)單實(shí)現(xiàn)的“四舍五入法”,具體方法如下岸腔。
在計(jì)算指令脈沖數(shù)時(shí)坪江,在浮點(diǎn)數(shù)的結(jié)果后面+0.5,再取整脑溢,以上文中的程序?yàn)槔?
MMTargetX=10; //橫向運(yùn)行距離10mm
PulseTargetX= (long) (MMTargetX * ValueX+0.5); //得到運(yùn)行脈沖數(shù)
YK_start_s_move(XAxisNum, PulseTargetX); //發(fā)指令讓X軸正向運(yùn)行
在計(jì)算指令脈沖數(shù)時(shí)采用了此方法可以減小取整誤差帶來(lái)的干擾僵朗,但是并不能消除,這是針對(duì)無(wú)法進(jìn)行上述兩種方法時(shí)的折衷辦法屑彻。不過(guò)由于簡(jiǎn)單易行验庙,推薦給軟件工程師在計(jì)算脈沖數(shù)時(shí)使用。
第三節(jié) 換向時(shí)第一個(gè)脈沖的運(yùn)動(dòng)方向誤差
在試機(jī)的過(guò)程中出現(xiàn)過(guò)這樣的問(wèn)題:當(dāng)使用某一品牌的驅(qū)動(dòng)器社牲,運(yùn)行就非常準(zhǔn)確粪薛;而換用另一品牌的驅(qū)動(dòng)器,走一些固定的動(dòng)作時(shí)就會(huì)越走越偏搏恤。而容易走偏的驅(qū)動(dòng)器換了另一家的控制器汗菜,就又好了。
問(wèn)題的原因出現(xiàn)在方向信號(hào)提前不足挑社。
當(dāng)前大部分驅(qū)動(dòng)器是按周期掃描鎖存方向信號(hào)陨界,當(dāng)捕捉到PULSE的有效信號(hào)沿時(shí),再去根據(jù)鎖存的方向信號(hào)進(jìn)行運(yùn)動(dòng)痛阻,在讀取鎖存方向信號(hào)到判斷PULSE信號(hào)有跳變之間有一個(gè)偏差τ菌瘪。而對(duì)于PULSE的有效邊沿,有些驅(qū)動(dòng)器是上升沿有效音拢,而有些驅(qū)動(dòng)器是下降沿有效莱芥。文中將上述類型的驅(qū)動(dòng)器簡(jiǎn)稱為先方向上升沿類型和先方向下降沿類型驅(qū)動(dòng)器。
也有一些國(guó)內(nèi)不太知名公司提供的驅(qū)動(dòng)器丈蛇,采取這樣的方式:當(dāng)捕捉到PULSE的有效信號(hào)沿時(shí)娩证,再去即時(shí)讀取方向信號(hào)阁巨,判斷運(yùn)動(dòng)方向。在讀取到有效信號(hào)沿后隐睹,距離讀取方向信號(hào)也有一個(gè)時(shí)間偏差τ岸寿。下文中將此類驅(qū)動(dòng)器稱之為上升沿后方向和下降沿后方向類型驅(qū)動(dòng)器。這種情況比較少見鹿脯,在此不做討論践斟。
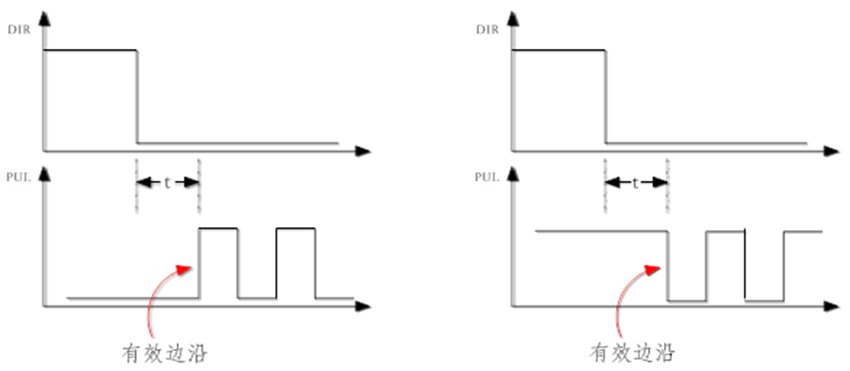
圖3先方向上升沿型驅(qū)動(dòng)器 圖4 先方向下降沿型驅(qū)動(dòng)器
不同公司的驅(qū)動(dòng)器,甚至同一公司的不同型號(hào)驅(qū)動(dòng)器抵师,時(shí)間τ都不一樣顶赎。有些驅(qū)動(dòng)器比如研控模擬驅(qū)動(dòng)器,這個(gè)時(shí)間非常欣ぱА疯坤;但是對(duì)于新型的數(shù)字型驅(qū)動(dòng)器,由于采樣周期的原因深浮,此周期長(zhǎng)達(dá)125μS贴膘,這就給控制信號(hào)提出了要求:
方向信號(hào)必須要早于脈沖信號(hào)到位,最少要早τ秒略号,否則會(huì)引起換向后刑峡,第一個(gè)起跳脈沖的運(yùn)動(dòng)方向錯(cuò)誤。
當(dāng)然玄柠,即使?jié)M足不了此要求突梦,對(duì)于普通的運(yùn)動(dòng)來(lái)說(shuō),如果發(fā)生了這類錯(cuò)誤無(wú)非就是起跳時(shí)少了2個(gè)脈沖羽利,一般情況下不會(huì)影響設(shè)備精度宫患。但是當(dāng)設(shè)備被要求反復(fù)折返的啟停運(yùn)動(dòng)時(shí),就有可能引起誤差的積累这弧。但是同時(shí)娃闲,因?yàn)榇苏`差類似于機(jī)械間隙,只出現(xiàn)在換向后的第一次運(yùn)動(dòng)時(shí)匾浪;而大部分情況下逛徽,正反運(yùn)動(dòng)會(huì)對(duì)此誤差進(jìn)行抵消。因此蚜烹,此情況只會(huì)帶來(lái)微小的誤差穗免,不會(huì)產(chǎn)生太大的影響,但在對(duì)精度要求非常高的場(chǎng)合需要注意這個(gè)問(wèn)題报案。
規(guī)避方法:查看驅(qū)動(dòng)器產(chǎn)品說(shuō)明書趋臼,大部分驅(qū)動(dòng)器都會(huì)對(duì)此時(shí)間τ進(jìn)行規(guī)定。而研控MCC1410C的方向提前時(shí)間受起跳速度影響,最短情況下105μS簿翔;但只要將起跳速度降到100KHz以下接骄,方向信號(hào)的提前時(shí)間就到了毫秒級(jí)別,不會(huì)產(chǎn)生上述錯(cuò)誤的情況牺会。
第四節(jié) 原點(diǎn)復(fù)位誤差
有的客戶反饋锈犯,在進(jìn)行復(fù)位動(dòng)作的時(shí)候,就會(huì)產(chǎn)生位置偏差铃挠。
一般來(lái)說(shuō),我們推薦客戶在設(shè)計(jì)工序時(shí)堡掏,每完成一整套加工步驟后应结,進(jìn)行一次復(fù)位動(dòng)作,這樣可以消除積累誤差泉唁,包括機(jī)械打滑誤差鹅龄、齒輪間隙誤差和驅(qū)動(dòng)器少量丟步造成的誤差。但復(fù)位動(dòng)作的運(yùn)動(dòng)參數(shù)設(shè)置亭畜、復(fù)位動(dòng)作順序設(shè)置扮休、傳感器的選擇和安裝位置、以及伺服參數(shù)設(shè)置的恰當(dāng)與否都會(huì)影響復(fù)位精度拴鸵。當(dāng)客戶發(fā)現(xiàn)復(fù)位會(huì)導(dǎo)致運(yùn)行位置不準(zhǔn)時(shí)玷坠,客戶通常會(huì)首要考慮排除傳感器靈敏度、動(dòng)作是否過(guò)猛等劲藐,因此問(wèn)題往往不大八堡,本節(jié)主要描述當(dāng)伺服參數(shù)設(shè)置不當(dāng)這一較少能考慮到的情況會(huì)引起的復(fù)位偏差。當(dāng)使用伺服電機(jī)時(shí)聘芜,如果參數(shù)調(diào)整不當(dāng)兄渺,剛性太弱,會(huì)造成該軸原點(diǎn)復(fù)位時(shí)的誤差磁揽。
總的來(lái)說(shuō)寝典,伺服是一個(gè)必須要考慮其滯后特性的執(zhí)行部件。當(dāng)設(shè)置伺服參數(shù)時(shí)伺亭,剛性越小缅坯,運(yùn)行時(shí)的實(shí)際滯后就越大。直觀上看起來(lái)就是“軟軟的呀埠,懶懶的”铭歪,指令脈沖開始發(fā)送了,它才會(huì)慢慢動(dòng)起來(lái)氛玛;指令脈沖已經(jīng)發(fā)完不發(fā)了搀薛,它還要往前走一陣才能停下來(lái)。這種特性跟它的閉環(huán)控制特性有一定的關(guān)系。
當(dāng)單軸運(yùn)動(dòng)進(jìn)行時(shí)稻填,這種滯后通常不會(huì)影響生產(chǎn)字钓,甚至覺(jué)察不出來(lái),因?yàn)殡m然運(yùn)動(dòng)滯后恰壁,但是最終還是會(huì)準(zhǔn)確到位姊象。但是當(dāng)進(jìn)行插補(bǔ)運(yùn)動(dòng)或者原點(diǎn)復(fù)位時(shí)就會(huì)產(chǎn)生很大的影響。
比如當(dāng)系統(tǒng)復(fù)位時(shí)晓褪,當(dāng)傳感器被觸發(fā)堵漱,發(fā)出限位信號(hào)給控制卡,控制卡馬上停止了脈沖的發(fā)送涣仿。但是此時(shí)伺服電機(jī)由于反應(yīng)的滯后勤庐,還是會(huì)往前走一陣,這一段距離就造成了偏差好港。
解決的方法就是:
1.在系統(tǒng)穩(wěn)定沒(méi)有太大沖擊的情況下盡量調(diào)高伺服的剛性愉镰;
2.在不影響生產(chǎn)效率的情況下降低復(fù)位運(yùn)動(dòng)的速度,或者采取二次復(fù)位的方法钧汹,第一次高速?gòu)?fù)位丈探,到位后,再低速向回找原點(diǎn)信號(hào)拔莱。
第五節(jié) 其他情況
情況一:驅(qū)動(dòng)電壓/電流不足
當(dāng)客戶采用一路控制信號(hào)帶多路驅(qū)動(dòng)器時(shí)碗降,可能會(huì)出現(xiàn)驅(qū)動(dòng)電流不足的情況,繼而導(dǎo)致驅(qū)動(dòng)器無(wú)法順利獲取信號(hào)塘秦。
研控運(yùn)動(dòng)控制卡多采用AM26C31芯片來(lái)產(chǎn)生驅(qū)動(dòng)電流遗锣,限流電阻20歐姆,最大電流150mA湾蝙,因此不推薦采用一路運(yùn)動(dòng)控制信號(hào)帶多路驅(qū)動(dòng)器宝猩。如果必須采用這種接法,則最多帶兩臺(tái)驅(qū)動(dòng)器惰绘,如果超過(guò)此數(shù)值可能會(huì)造成芯片過(guò)熱燒壞或者信號(hào)丟失等情況孙远;同時(shí)要注意,不保證此種接法的運(yùn)動(dòng)穩(wěn)定性蟀蛆。
情況二:限位信號(hào)干擾/誤碰
客戶采用非研控生產(chǎn)的運(yùn)動(dòng)控制卡時(shí)友熟,可能會(huì)隨機(jī)地出現(xiàn)設(shè)定的運(yùn)動(dòng)距離還沒(méi)走到,就停下來(lái)的問(wèn)題男沛。甚至?xí)?lái)撞機(jī)等嚴(yán)重的情況栓占。這種偏差會(huì)非常大,隨機(jī)無(wú)規(guī)律地出現(xiàn)滞泣,一次出現(xiàn)馬上就造成運(yùn)行的混亂橡彬。
這種情況往往是某軸在運(yùn)行時(shí)媳阴,該軸的“限位信號(hào)”受到了干擾,令板卡認(rèn)為應(yīng)該停止該軸的動(dòng)作橄霉。
對(duì)于這種情況的判定要從軟件上進(jìn)行抓取窃爷,當(dāng)調(diào)用函數(shù)判斷一個(gè)軸是否停止的時(shí)候,如果返回值不是“脈沖發(fā)送完停止”姓蜂,而是“未知異常停止”或者“遇到限位點(diǎn)停止”按厘,就基本可以定位是限位點(diǎn)受到了干擾。然后可以將受到干擾的軸的限位信號(hào)從接線板上斷開钱慢,看看是否還有此情況產(chǎn)生逮京。
針對(duì)此問(wèn)題,需要從硬件上查找干擾源束莫、干擾傳遞的通路懒棉。常規(guī)的濾波,分開供電麦箍,屏蔽漓藕,重新布線等方法都可以試一下陶珠。不過(guò)最有效的挟裂,是換用研控的運(yùn)動(dòng)控制卡產(chǎn)品,具備強(qiáng)大的抗干擾特性(濾波參數(shù)可設(shè)置)揍诽,能夠根除此類問(wèn)題诀蓉。
報(bào)告人:余挺
| 聯(lián)系電話: | 0755-86142288 |
| 服務(wù)熱線: | 400-033-0069(銷售/技術(shù)專線) |
| 總部地址: | 深圳市南山區(qū)西麗街道打石一路深圳國(guó)際創(chuàng)新谷6棟B座16樓 |
| 制造中心: | 廣東省惠州市惠城區(qū)仲愷高新區(qū)東江科技園東新大道32-1號(hào)研控工業(yè)園 |

